1ヵ月間、自動運転と少しでも関連のある企業を全て集めてみて、そこで可能性がなかったり不要な企業を除いて残りの20社を確認してみた。 自動運転関連技術で海外企業や国内大企業を超える強小企業を見つけられなかった点は少し残念だが、意外な企業を発掘した成果はあった。 関連セクター内の企業だけでなく、産業資料も一緒に探しながら自動運転生態系がどのように流れているかを確認し、この機会に整理してみた。 整理せずに目で読んで進むと、頭の中の消しゴムがすぐに消す関係で。1.自動運転の現在2.自動運転:センサー3.自動運転:認識-判断-制御プロセス4.自動運転:通信5.関連企業

1. 1. 自動運転の現在
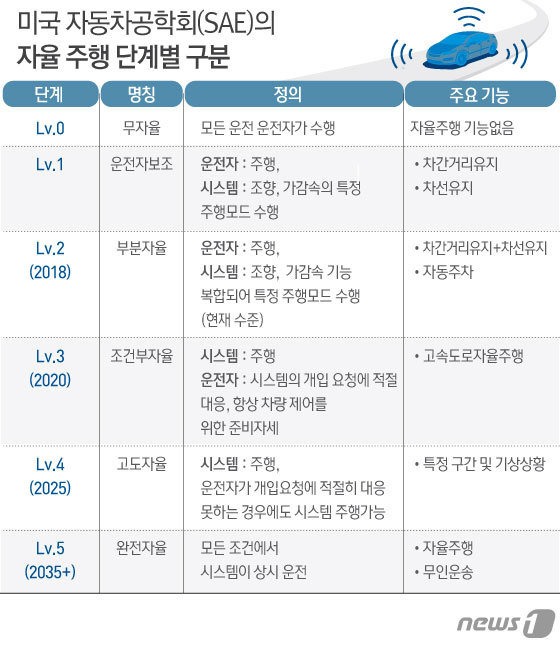
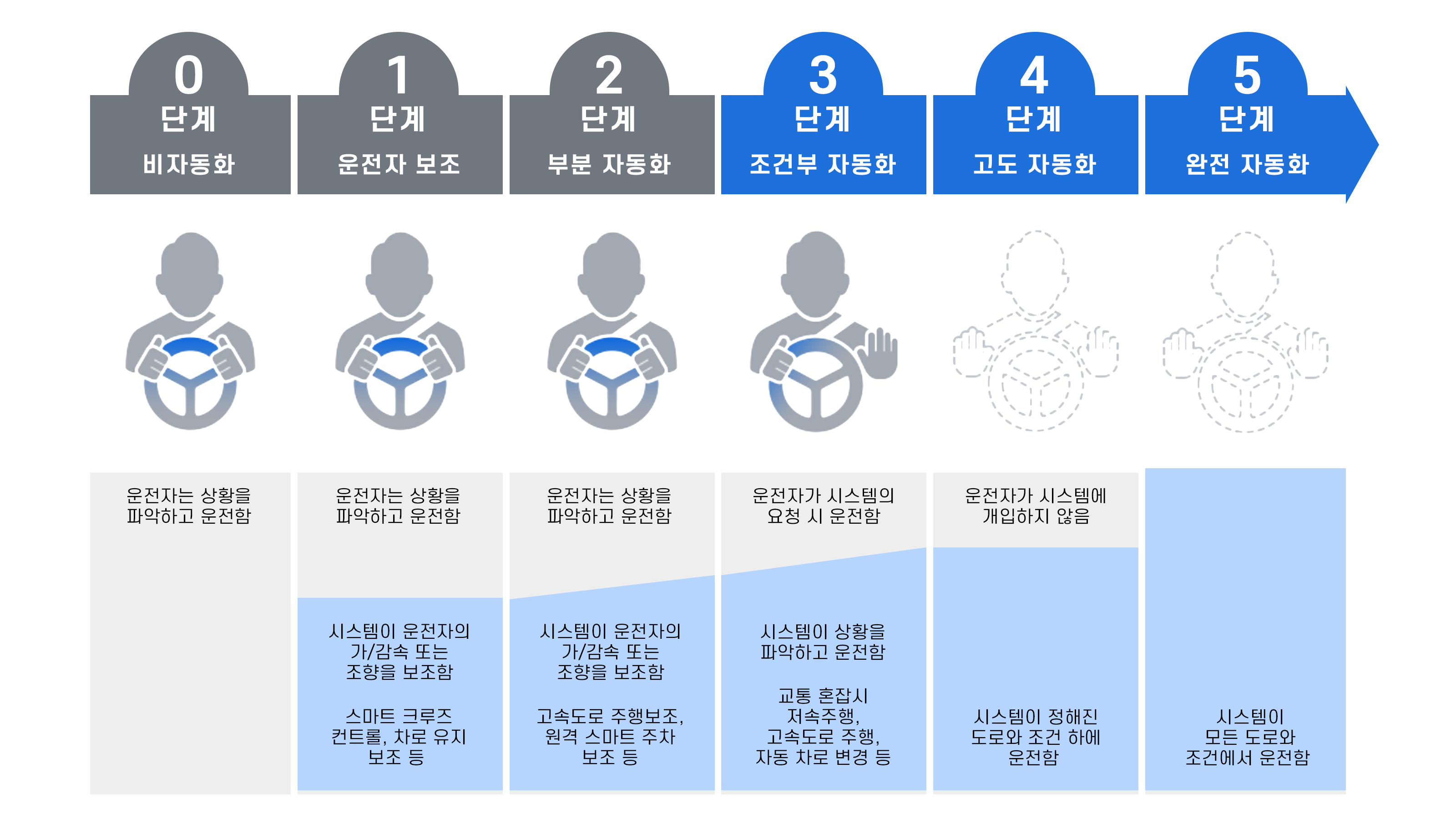
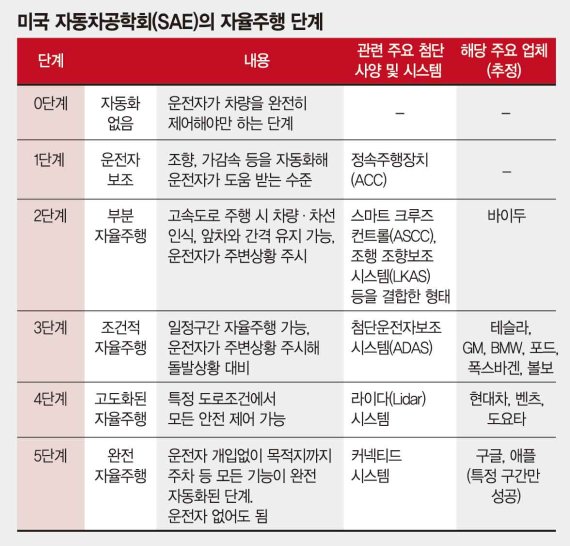
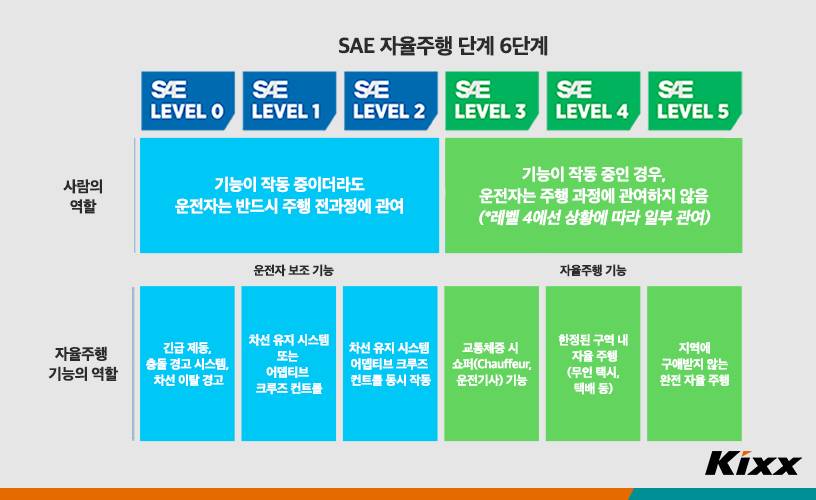
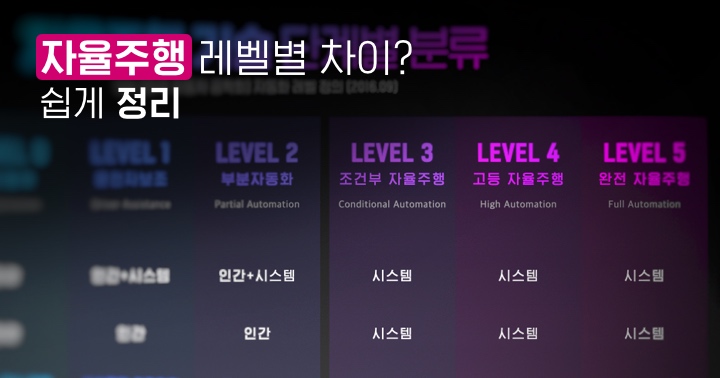
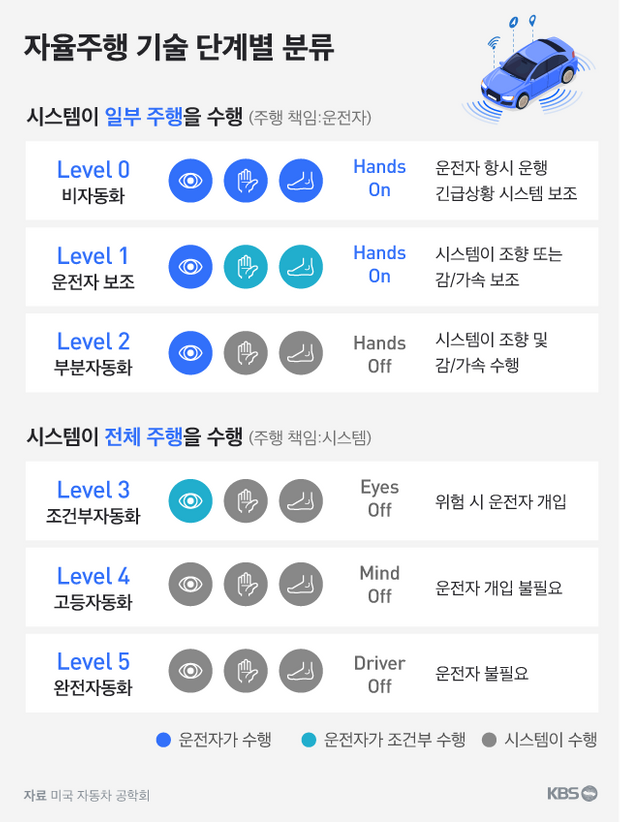
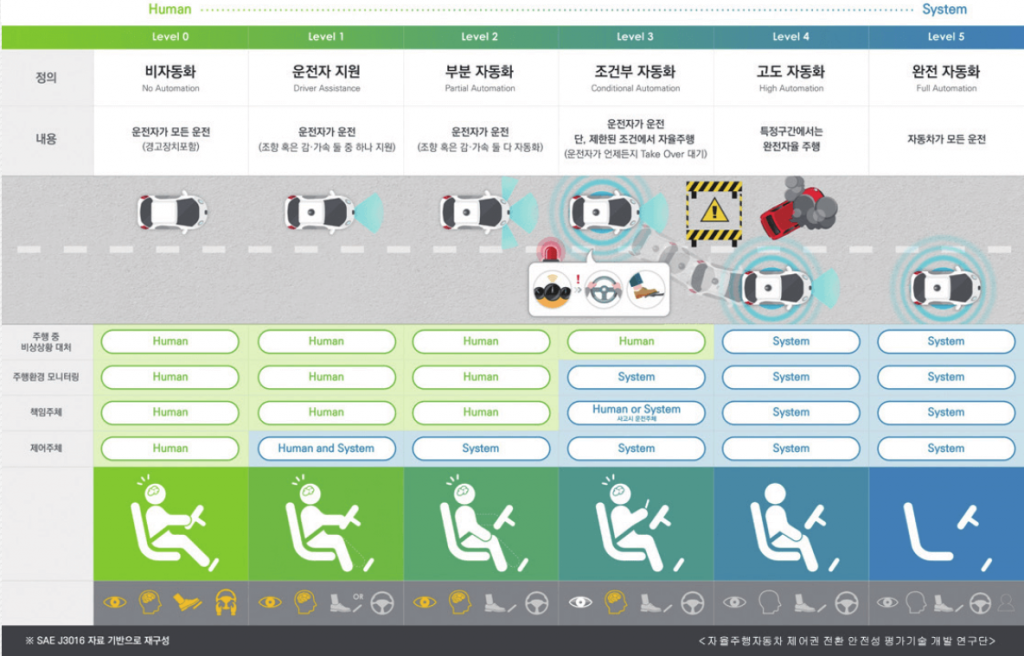
自動運転は抽象的な概念であるため、主要機関で具体的な基準に区分して各段階を作っておいた。 そのうちの一つはSAEで、米国自動車技術学会で5段階に区分し、米国道路交通安全局のNHTSAで4段階に区分した。 探してみると、国別にも基準を変えて区分している。 ところが、今はNHTSAもSAE基準を公式に採用しているため、自動運転は5段階区分されると考えればいいと思う。 大体、3段階からが自動運転の始まりと見て、5段階からは運転席自体も必要なくなる段階に達する。 米国GMの「クルーズ」はサンフランシスコ全域で完全無人タクシーを運営しており、欧州でもロボタクシーをテスト運営している。 韓国はジェネシスG90でレベル3の自動運転モデルが発売されると期待していたが
ジェネシス、年式変更「2023 G90」を発売···レベル3自動運転は抜けて(総合)|聯合ニュース(ソウル=聯合ニュース)イム·ギチャン記者=現代自動車[005380]の高級ブランドジェネシスがフラッグシップセダンG90の年式変更モデル「2023 G90」を···www.yna.co.kr
残念ながら、今年の年末にはなりそうだ。 むしろ最近公開されたEV9がレベル3が適用され、先に発売されるものと見られる。

レベル3の自動運転エンジンをかけた起亜··· EV9「手放しで走る」起亜自動車が29日、大型電気スポーツ用多目的車(SUV)EV9を公開した。 上位モデルの「EV9 GTライン」には、完全自動運転前段階である「レベル3」自動運転機能を搭載したnews.kmib.co.kr
EV9の発売を5月末頃と推測しているので。では、現代以外にレベル3水準の量産モデルはどのような車両があるだろうか?ニュースで検索してみた時、まだレベル3の量産モデルは発売されておらず、テスラも2.5段階水準だ。 今年1月のニュースを見ると、ベンツがテスラを抜いてレベル3水準の車を米国で世界で初めて販売される見通しだ。
ベンツ、テスラを抜いて米国でレベル3自動運転まもなく承認-カーガイ未来自動車産業は大きく2つのキーワードで定義される。 エコと自動運転だ。 特に自動運転機能は購読型サービスという新しい売上源を確保することができ、自動車メーカーの最大の未来収益性として浮上した。 わずか…···www.carguy.kr
ベンツの技術を見るとテスラと違って前後方ライだ センサーが装着されている。 テスラはカメラを主要センサーでデータを収集するが、光反射による前方障害物認識エラー事故や停車中の消防車衝突事故が起きるのを見るとテスラドラだ 価格が下落すれば戦略を変えるのではないかと思う。 人も五感を使ってみて、感じて、聞いているのに車から目に見えるカメラだけで、追加的にレーダーセンサーまで除去しながら独自の道を歩んでいる。 テスラでカメラだけで完全自動運転を実現できるのか。

先月のニュースを見ると、テスラも結局手を挙げてレーダーセンサーをオプションで再び装着するモデルが出るだろうというニュースだ。 安全を費用と交換するのは容易ではなさそうだ。 グーグルの子会社Waymoは、Robotaxiを米フェニックス地域で運営している。 Robotaxiの特徴は、ドライバーのいない無人車両を呼び出す方式だ。
DB金融投資レポートを見ればロボタクシーがフェニックス地域だけで運行中の理由があるが、HDMap構築可否と道路条件および天気などのためフェニックス地域で運行中だという。 まず天気でフェニックス地域が1年中天気が晴れ、2番目に道路が他の地域に比べて良好な環境を持っている。 格子状の道路

GMのクルーズはサンフランシスコでロボタクシーの運営を開始した。

ところが、ウェイモと同じ理由で運営地域をオースティンとフェニックスに拡張する方針を発表した。 GMクルーズはドライバーが同乗する方式だ。 完成車以外にBAIDUおよびINTELの子会社Mobileyeは、世界的な自動運転車用半導体開発メーカーとして先端ドライバー支援システム(ADAS)チップを生産する。 モービルアイはカメラ基盤ADASチップ市場で70%シェアを占めた1位企業で、ファブレスラの生産はほとんどTSMCに任せている。 エヌビディアも自動運転に関する内容を確認してみると、HWプラットフォームと開発者向けSW販売を行っている。 LuminarはLiDARセンサー価格を下げるために天才CEOが努力しており、TomTomは道路や位置情報を含むHDMapを自動運転車メーカーに供給する計画だ。 そして今回知ったAptiveという企業は2019年に現代自動車と自動運転合弁法人であるMotinalを設立し持分投資とパートナーシップを通じてカメラ、レーダー、ライダーまで各種センサーを供給する計画だ。2. 自動運転:センサー(カメラ、Radar、RiDar)自動運転のためのセンサーとしては大きくカメラとレーダー、ライダーの3つが挙げられる。 超音波センサーもあるが、すでに多く普及しており、自動運転のためではなく駐車のための近接センサーとしてのみ使用されるため除外した。 このような自動運転用センサーは、ActiveセンサーとPassiveセンサーに区分される。 Activeセンサーはレーダーとライダーで直接エネルギーを発散し反射されるエネルギーを受信する方式だ。 これに対し、Passiveセンサーであるカメラは周辺に光がなかったり、少なければ本来の機能を果たせない。 Activeセンサーは電磁波と光を発射した後、物体に当たって反射されて戻ってくる信号を感知して物体と距離を測定できるため、光がなくても正常に作動が可能だ。 このような特徴のため、普通自動運転車には少なくとも2種類以上の組み合わせが反映され、レベル3以上の車両には(ほとんど)3種類のセンサーがすべて搭載される。 センサーはそれぞれの役割が次の図のようになっている。 シンプルながらも必要な説明だけよく貼っておいた絵なのに、出所を見ると前の職場で作った絵だね。1) 1) カメラ自動運転ではイメージセンサーという名前がより頻繁に使われる。 傾向も単純に前方物体の有無を確認するビューイング(Viewing)から物体を認識し距離を確認するセンシング(Sensing)する段階に進んでいる。 単純にイメージ情報を供給するビューイングの役割から、全方位物を認知し、ドライバーに安定的な走行のための情報を提供するセンシングの段階に入った。 普通ADAS用センシングカメラの場合、1~2M画素のイメージセンサーを使用することになる。 VGA級の30万画素、HD級が1~2万画素を使用する。 今後、技術が発展し価格が低くなり画素数も上がることになるが、ちなみにMCネックスは22年末基準で前方6Mのセンシングカメラを準備していると知られている。 車両1台当たりのカメラ装着数は増加傾向であり、現代自動車のプレミアムラインの場合、前方2個、全方位4個、後側方2個のカメラが装着され、計8個のカメラが装着されている。 今後、Night Vision機能など追加機能のためにカメラは12個まで搭載されるものと予想される。自動運転レベルの観点から見ても、Level 2基準で一般的に7つのカメラが装着され、Level 3では8~12個、Level 4では12~15個、Level 5では15~20個まで増加する見通しだ。 Qの増加が可能だということだ。 カメラを主要センサーとして使用するテスラのカメラ装着現況を見るとテスラのホームページ前方3つ、後方1つ、前側方2つ、後側方2つの計8つを使用している。 カメラの主な機能を見ると、前方交通状況認知(AEB**:緊急制動装置機能含む)Night Vision夜間透視機能前方車線離脱防止両側サラウンドビュー状況サイドミラーカメラで後方四角案内後方駐車補助後方サラウンドビュー提供内部カメラの居眠り運転監視AEB**:Autonomous Emergency Brake。前方車両との距離を通じて出動脅威が生じた場合は警告及び緊急制動実施。 センシング方式によってカメラ+レーダー/カメラ/レーダー/ライダーの4つの方式で構成。カメラだけを使用する場合、コスト削減は可能だが悪天候に状況把握が難しい短所。 カメラの長所としてPの上昇もある。 DS投資証券レポートによると、完成車メーカーの画素数の上方修正で製品のPが上昇し、従来の2M対比6Mモジュールの使用量も50%以上増加するものと推算される。 大部分の部品は時間が経てばASPが下落するように全般的なカメラモジュールのASPも下落するものと予想されるが、特徴的な部分が高画素に行くほどASPは増加することになる。 これに対し、製品Mixによって売上/利益は変わる可能性があるという話だ。上の左側図表を見ると、主要部品のASPは時間が経つにつれて下落を予想している。 ところが右側図表のMCネックス電装カメラASP推移を見ると反対の現象が現れる。 むしろASPが増加する様子を見せている。 PとQの同時増加が可能だというシナリオだ。グローバル車両用カメラバリューチェーンを見るとチップ – モジュール – システムの関係につながっている。 レーダーやライダーに比べてバリューチェーンが多様に分布しているが、それだけ市場も大きいという話だ。 国内企業の方向を見るとスマートフォンカメラから車両用カメラに領域を拡張する道を歩んでいる。 市場も大きいだけに、ライバル会社も多様なカメラ市場だ。HLマンドIR資料HL Klemoveの最近の資料を見ると、前方カメラはL4水準の量産製品が出ることになっている。 MCネックスが22年末6Mを目標にしたが、HL Kl Kim8Mで一段階高い水準で量産までしてしまった。 ■ カメラ長所高い解像度低価格と小型サイズ■カメラ短所夜間や気象環境の影響2)Radar車両用レーダーの原理は車両から送信された電磁波信号が物体や車両に反射されて帰ってきた受信電磁波を受信し、二つの信号間のドップラー周波数変化量を利用して相手物体との距離と相対速度を推定する原理だ。 送信変調方式によってパルスドップラーレーダーと周波数変調連続波(FMCW)レーダーに区分されるが、パルスドップラーレーダーは主に近距離用に使われ、周波数変調連続波レーダー(FMCW)は目標物の相対距離、速度と角度を抽出する時に使われる。 RadarはカメラとLiDarの短所補完のために主に使われる。 Radarは主に緊急制動システム、スマートクルーズコントロール、ブラインドスポット後側方警報センサーなどに必須で使われる。 探知距離が長く、夜や気象環境にとらわれないという長所がある。 価格も安く小型化が可能で、両側が動く状態でも安定的に距離と物体測定が可能だ。 しかし、短所としては解像度が低く小さな物体を感知するのが難しいということだ。 短所を補完するために大きさと重さを減らし、測定角と測定距離を高めて性能を向上させた製品が発売されている。 Radarの主な機能を見ると、前方車両と距離測定をしながら距離維持衝突予想時に緊急制動歩行者認識交通状況認識駐車補助後方出動通知後側方死角地帯通知グローバル車両用レーダーのバリューチェーンを見るとカメラに比べて関連企業が多くない。 レーダーチップはアンテナと送受信機を通じて情報収集機能を遂行し、レーダーモジュールはセンシングされた信号をソフトウェアを通じて距離、角度、速度などを計算する役割をする。車両用レーダーの技術理解と技術展望 – テックワールドニュース[テックワールド=チョン·ファンヨン記者]車両用レーダーは車両の前方と側後方に相手車両と障害物の位置情報を運転者に提供し、自動運転自動車において車両を制御し運転者が安全に走行できる···www.epnc.co.kr上記の記事内容を見ると、レーダーチップを開発する業者が少ない理由が出ている。 レーダーチップの場合、ミリメートル帯域の高周波を使用するため、開発装備も高価だが、市場需要が大きくなくECU専門業者だけがレーダー開発に積極的な投資を進めている。 このような状況によって、レーダーセンシングとプロセッサーチップ市場は少数の半導体メーカーが独占しているが、ドイツのインフィニオンが40%で1位、STマイクロが37%で2位、フリースケールを買収したNXPが3位と集計されている。 ■ Radar長所夜間や気象環境に影響を受けない(悪天候後の環境で有用)探知距離がキム1935年から使われただけに有用性認定■Radar短所低い解像度で小さな物体感知困難3)LiDarはLight Detection and Rangingの略で高出力レーザーを活用して物体に向かって発射した光が戻ってくるまでの時間を測定し距離情報を感知する技法だ。 毎秒数百万個の光を周囲に発射し、戻ってくる光の時間差を利用して距離を計算する方式だ。예: www.fierceelectronics.comLiDarを搭載する理由は、自動運転技術の安定性のため、ドライバーに代わってセンサーから感知されたデータの正確性を高めることができるからです。 カメラとレーダーだけでは悪天候や夜間状況、中長距離周辺の状況把握が難しいため、LiDarを通じて3次元データを獲得できるようになります。 ■ LiDarセンシング方式ですLiDarを搭載する理由は、自動運転技術の安定性のため、ドライバーに代わってセンサーから感知されたデータの正確性を高めることができるからです。 カメラとレーダーだけでは悪天候や夜間状況、中長距離周辺の状況把握が難しいため、LiDarを通じて3次元データを獲得できるようになります。 ■ LiDarセンシング方式です距離測定方法 特徴 dToF飛行時間距離測定光が目標体に到達後に戻る時間測定送信機と検出器で光の速度と時間差を利用して距離測定複数の物体感知場/短距離使用(0.1m~300m) 高い精度 iToF間接飛行時間距離測定レーザーから出る光の連続波利用送信波形と受信波形間の位相差を利用し、距離測定10m未満の短距離に適合室内環境に使用適切な単一物体のみ感知可能 FMCW波長可変レーザーを使用検出器で反射された光と連続波長波長周波数で生成される 周波数変化を測定しながらレーザービームを放出して移動速度測定可能)短距離/長距離使用日光、反射、その他干渉に敏感でない距離測定方向速度情報捕捉(4次元データ処理可能)短所:高い費用レポートの内容を見ると、難しい単語で作成されているが、シンプルにdToFは切れた短波長で直接的な時間測定を通じて距離を計算し、iToFは連続的な波長を送って反射された時間測定を通じて距離を計算する。(ちなみに携帯電話にはdToF方式)FMCWは時間によって周波数が異なる信号を連続的に放出した後、反射される信号を利用して相対距離、速度を測定する。 ■ LiDar感知方式LiDarは現在、大多数の自動運転車に回転型の製品を中心に商用化を進めている。 しかし、外観デザインと耐久性の理由で固定型製品市場が拡大するものと予想される。 タクシーのようにルーフにあんなものを貼り付けたくないから。このベストでLiDarに関する詳しいレポートを参照して簡単に表にまとめると作動方式特徴回転型Spinningモーターを利用してセンサーを360度回転原価費用高い(Luminarでコスパ製品開発)モーターの低い耐久性Mirror Mirrorが回転する方式固定型Flashレーザーを前方に照らし受信機から反射された散乱光捕捉して一つの全体場面捕捉方式高い耐久性価格競争力デザインMEMS電圧で傾きが変わるミラーを使用してスキャンOPA光学位相モジュレーターがレンズを通過する光の速度制御しビームを様々な方向に撃ってスキャンする方式回転型LiDarが多く使われると聞いて探してみたらアンマンドソリューションホームページアンマンドソリューションという企業で作ったWITH:USという車両があった。 この車両に取り付けられたLiDaRを見ると、大きさは大きくないが、車両の外部に飛び出すように装着されている。 写真の中の車両は前後に2つずつ4つとループ側面に2つずつ計6つが装着されている。 現代自動車では回転型を選択する場合、デザイン的に改善して量産すると信じている。Solid State Type(固定型)ライダー技術動向を見るとLiDarはレーザーを光源として使うのに光の波長とエネルギーが重要だが、レポート内容が少し難しく説明されており、簡単に解くと図右側のEELの場合、高いエネルギー放出で光ファイバー増幅器や金属切断分野で使われる。 エネルギーが高い代わりに品質面で安定化が必要であり、追加検出器と費用面で不利だ。 左図のVCSELの場合、相対的に低い出力と垂直に放出される特徴のため、品質で安定した波長を維持してライダー、スマートフォン、5G製品に多く搭載されている。 車両用ライダーに使われるレーザー波長帯域も905nmと1,550nmが主に使われる。 905nmは相対的に認識範囲が狭いが、消耗電力が低く水分による吸収力が低い。 また、サイズが小さくて製品化に有利で費用面で有利なため、多くの企業が大量生産を目標に積極的に開発中だとイーベストレポートで言及されている。 しかし、韓国IR協議会の「ライダー」レポートによると、1550nm波長のレーザーは目に強く吸収されず、比較的高い出力で活用されると言及している。インフォワークスホームページFMCWベースの4DLiDARを作るインフォワークスホームページにも905nmのリスクについて言及しておりイーベスト本レポートに作成されたライダ 4つの製品のうち、3つの製品が1550nm波長を使用していることが分かった。 905nmと1,550nmの長/短所が明確で、人体有害性、安定性、距離測点範囲、小型化、費用、精度などを考慮して戦略的に選択中だが安全性論難が発生する余地があり個人的には1,550nmに集中するのではないかという考えだ。 LiDar の主要機能を見ると、Radar と類似した機能を持つ。前方車両と距離測定歩行者認識交通状況認識後方出動通知後側方死角地帯通知■LiDar長所の高い解像度と精度他産業分野拡張可能性LiDarは車両だけでなくスマート工場、スマートシティ、スマートモビリティなどの多様な産業にも適用できる長所を持っている。 ■ LiDar短所高速走行の限界ライダーは高速走行に弱点があるが、ライダーのレーザー出力を高める場合、光の強度が強くなり、周辺カメラレンズが損傷する場合が発生するほど危険性が高くなった。 回転型のライダーは出力を下げて回転数を高める場合、モーターの短い寿命と頻繁な故障、発熱問題が発生する短所がある。 これに現在ライダー 技術では一定速度以上の運行が難しい限界を持っている。 高いコスト雨天、大雪時の乱反射など気象環境の影響。3. 自動運転:認識-判断-制御プロセス自動運転車は、雪ではなくセンサーで道路状況と物体情報を受け取るが、このような情報をソフトウェア処理過程を通じて1)道路状況認識(Perception)2情報に基づいて目的地計画と判断(Planning/Dicision)3)車両制御(Control)の過程を経る。出典:自動運転完全征服(DB金融投資)認識過程で必要なセンサーは先に確認し、その後の過程である判断/計画と制御について調べる。 個人的な考えでは自動運転の核心は判断/計画だと思う。 前段のセンサーはそれぞれの役割とスペックが決まっているため、使用目的とセンサー位置によって多様なセンサーを選択できる。 最後の制御部分も現在の完成車メーカーの技術力を見ると、難しい技術ではなさそうだ。 それなら、各種センサーの情報を受けて現在の状況を把握し、前に進む方向を制御できるよう判断を下す部分が自動運転の核心だろう。 1) 1) Perceptionセンサーから送る信号は加工されていないRaw dataで、各種数字に過ぎない。 これらの数字を有意義な情報に切り替えるためには、Detection と Localization の2 つの技術が必要である。A) Detectionは道路および物体などを認識する方法であり、B) Localizationは車両が現在どこにあるのか正確な位置を把握する方法だ。 Detectionを通じて道路、表示板、車両、人、物を把握して動くか停止しているかを確認する過程が必要だ。 これと共に、LocalizationでGPSとHDMap、周辺センサーを通じて地図上の車両の正確な位置を把握する。 A) Detectionそれぞれのセンサーから入ってくるデータが情報に変換されるために認識の過程を経ることになり、この認識の過程で必須なSWが人工知能アルゴリズムだ。Byホンゴン族長私たちが言う人工知能は本当に抽象的で大きな範囲であり、その中にコンピュータが自ら学習する方法を持った時、マシンラーニングのカテゴリーに細分化されて入る。 そしてその中に最近よく使われるディープラーニングのカテゴリーがあるが、このディープラーニングの中でもアルゴリズムによってANN、DNN、CNN、RNなどがある。 自動運転で物体認識のために使用するアルゴリズムはCNNを多く使用し、テスラは周辺物の動きを予測するのにRNを使用することが知られている。CNN – 위키백과CNN, 컨볼루션 신경망은 주로 이미지 인식에 적용되는 심층 신경망이다.CNN을 사용하는 이유는 일반적인 신경망은 두차원 데이터 및 열차와 열차의 두차원 데이터를 수신하고 학습할 수 있다는 점이다.그리고 다른 알고리즘과는 달리 CNN을 이용한 이미지 분류의 경우 공정은 거의 사용되지 않습니다.(저장 시간 절약 시간)RNN – 위키백과RNN – 위키백과RNN, 재귀 신경망은 텍스트, 비디오, 비디오, 비디오, 비디오, 음성 등 데이터 요소를 분류하거나 예측할 수 있습니다.주어진 문장은 주어진 문장을 예측할 때 다음 단어를 예측할 수 있습니다.이런 식으로, 테슬라가 지역화 환경을 확인했을 때 RNN. B)를 사용하고 있는 과정이 필요합니다.요즘은 GPS에 GPS에 힘입어 어느 곳에서든, 자율 주행에 대한 GPS에 대한 접근법이 필요할 수 있습니다.이 방법에 필요한 방법은 HD 맵 및 D램(SIM) 기반 알고리즘 사용입니다.HD 맵의 경우 지도에 위치한 랜드마크 정보는 센서로 인식되고 차량 위치를 기준으로 결정됩니다.차량이 HD 맵에 랜드마크 위치를 정확하게 인식함으로써 지도의 위치를 정확하게 인식함으로써 지도에 위치하는 방법을 찾을 수 있는 방법이다.이 경우 HD 맵을 생성하는 데 큰 문제가 있습니다.또한 다양한 탑과 건물들이 재구성 또는 리모델링에 변화가 필요할 수 있기 때문에 연속 업데이트를 계속할 수 있습니다.이전 기사에서는 테슬라가 이 방법을 사용하지 않는다고 말했다.S램은 차량 주변 환경을 인식하고 차량 위치를 식별하는 방법입니다.다른 말로 로봇 클리닝 위치를 탐색할 때 주변 위치를 탐색하고 지도에 청소하는 방법을 탐구하는 방법이다.그러면 위에서 언급한 HD 맵이 필요하지 않습니다.테슬라프는 또한 이 기술을 사용하고 있으며, 구글은 두 가지 방법 2) 계획/D의 혼합을 사용한다.기존 전자 컨트롤 장치는 전자 컨트롤 장치 단일 기능을 독립적으로 수행하기 위해 설계되었습니다. 하지만 100 전자 컨트롤 장치가 최근 전자 컨트롤 장치가 설치되어 있습니다.결과적으로 각 필드를 통합하는 ECU 컨트롤러가 도입되었고 최근 ECU 또는 최근 ECU(DU)에 비해, CU 또는 DECU를 추가할 수 있는 ECU 컨트롤러가 등장했다. 3) 3) 제어제어부는 현재 기술에 어려움이 없다.전 전에 확인했던 HL KL K렘의 IR 데이터에서 쉽게 표현된 사진을 가져왔습니다.제어 유닛은 이전 계획/ 심판에 주어진 각도, 압력, 압력, 압력, 변위, 변위, 변위, 변위, 변위, 변위까지 이동할 수 있다.현재 옵션뿐만 아니라 멀리 설치할 수 있는 주차 보조 기능이 아니라 먼 미래에 대한 기술이 아니라는 것을 보여준다.제어부는 현재 기술에 어려움이 없다.전 전에 확인했던 HL KL K렘의 IR 데이터에서 쉽게 표현된 사진을 가져왔습니다.제어 유닛은 이전 계획/ 심판에 주어진 각도, 압력, 압력, 압력, 변위, 변위, 변위, 변위, 변위, 변위까지 이동할 수 있다.현재 옵션뿐만 아니라 멀리 설치할 수 있는 주차 보조 기능이 아니라 먼 미래에 대한 기술이 아니라는 것을 보여준다.단어에서 볼 수 있듯이 MIMO 기술은 여러 안테나를 사용하여 안테나 수를 늘리거나 통신의 신뢰성을 높일 수 있는 안테나 기술이다.무선 통신에서 채널 손실 및 간섭을 최소화할 수 있는 기술로서 분류된다.많은 안테나를 사용하는 대역폭 및 변속기 속도를 제공하는 장점이 있습니다.) 빔 형성samsung.comsamsung.com네이버네이버라닉스 보도 자료랜스는 한류 통신 모델의 C-V2X 통신 모뎀을 통합하는 하이브리드 OBU를 출시한다고 말했다.Chemtronics 홈 페이지화학제품도 하이브리드 OBU를 하이브리드 OBU로 사용할 수 있는 제품을 하이브리드 O-V2XU로 사용할 수 있는 제품을 출시하고 있다.화학제품도 하이브리드 OBU를 하이브리드 OBU로 사용할 수 있는 제품을 하이브리드 O-V2XU로 사용할 수 있는 제품을 출시하고 있다.센서 HL 만델로(Kolo)와 같은 관련 회사들은 현대모비스 대륙, 보쉬, 보쉬, 보쉬, 보쉬 등 관련 업체이다.구글, 모바일예, 톰 톰 톰 톰, 텔레콤, 현대모비스 대륙 등)를 매핑합니다.■ 국내 기업관련 기업 항목 센서 MCN, 현대모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모모기아 모터관계사 ITEM 배송현황 센서 MCNEX 카메라 현대/기아, PSA, GEELY, 르노, 볼보, 현대모비스, 탐탐통실라닉스 V2X 통신칩 켐트로닉스 V2X HW+SW (OBU, RSU) 국정과제부품 모바일가전 HUD, ADAS, 블랙박스 BMW, 전자장비, 현대, 기아차, 현대차, 기아차, 현대차관계사 ITEM 배송현황 센서 MCNEX 카메라 현대/기아, PSA, GEELY, 르노, 볼보, 현대모비스, 탐탐통실라닉스 V2X 통신칩 켐트로닉스 V2X HW+SW (OBU, RSU) 국정과제부품 모바일가전 HUD, ADAS, 블랙박스 BMW, 전자장비, 현대, 기아차, 현대차, 기아차, 현대차6. 내 의견에서는 이 연구의 목적은 기업이 속한 기업이 속한 기업이나 제품을 선택할 수 있는 기업이나 제품을 선택할 수 있는 기업이나 제품을 선택할 수 있는 기업들을 선택할 수 있다는 것을 선택할 수 있었다.자율주행 기술은 이차전지처럼 세계를 이끌 수 있는 분야이기 때문에 첫 회사를 찾을 수 있는 분야이다.그러나 시장이 성장함에 따라 성장할 수 있는 기업이 있을 것이고 매니저의 성장보다 커질 수 있는 기업이 될 가능성이 높다.그중에서는 관심 품목으로 추가할 수 있는 회사를 선택하는 경우 ■ HL KL Kim L Kim Clearch를 선택할 수 있습니다.6. 내 의견에서는 이 연구의 목적은 기업이 속한 기업이 속한 기업이나 제품을 선택할 수 있는 기업이나 제품을 선택할 수 있는 기업이나 제품을 선택할 수 있는 기업들을 선택할 수 있다는 것을 선택할 수 있었다.자율주행 기술은 이차전지처럼 세계를 이끌 수 있는 분야이기 때문에 첫 회사를 찾을 수 있는 분야이다.그러나 시장이 성장함에 따라 성장할 수 있는 기업이 있을 것이고 매니저의 성장보다 커질 수 있는 기업이 될 가능성이 높다.그중에서는 관심 품목으로 추가할 수 있는 회사를 선택하는 경우 ■ HL KL Kim L Kim Clearch를 선택할 수 있습니다.스마트 자동차 소프트웨어 플랫폼 사업을 운영하는 회사가 소프트웨어 개발(서비스) 판매 및 로열티 판매비 매출과 로열티 판매 수수료입니다.소프트웨어 개발 후 3년 이상 소프트웨어 개발 및 로열티 판매로 이어질 경우 매출액이 100%가 발생하지 않도록 한다.차량 소프트웨어가 소규모 기업들에 대한 독점적인 시장이다.그러나 자동화업체에서 소프트웨어를 내부화하는 위험이 있다.■ 현대 자동차스마트 자동차 소프트웨어 플랫폼 사업을 운영하는 회사가 소프트웨어 개발(서비스) 판매 및 로열티 판매비 매출과 로열티 판매 수수료입니다.소프트웨어 개발 후 3년 이상 소프트웨어 개발 및 로열티 판매로 이어질 경우 매출액이 100%가 발생하지 않도록 한다.차량 소프트웨어가 소규모 기업들에 대한 독점적인 시장이다.그러나 자동화업체에서 소프트웨어를 내부화하는 위험이 있다.■ 현대 자동차