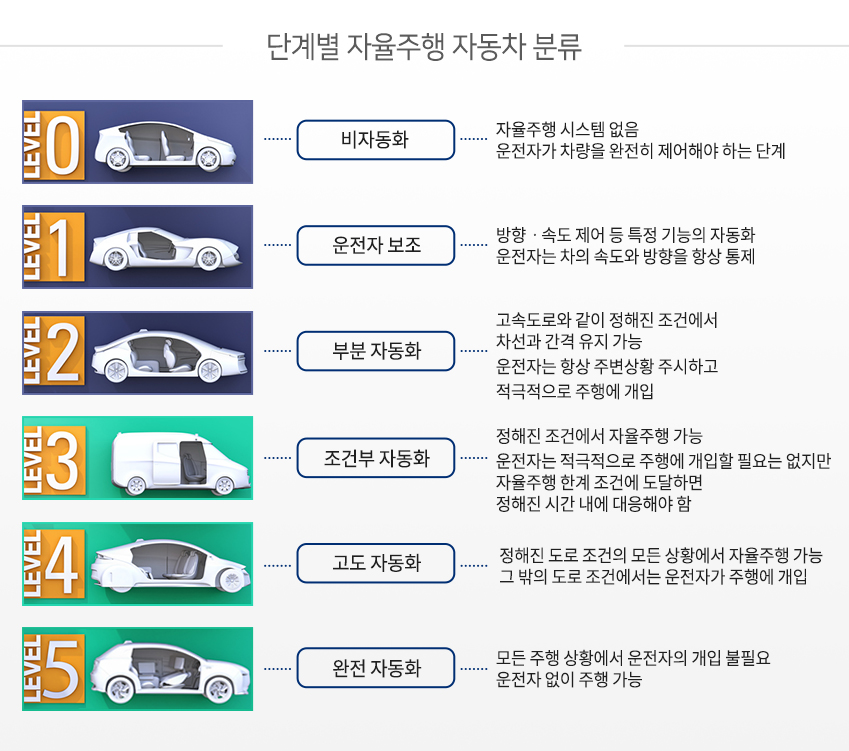
자동 운전 1925년에 처음 원격 조종 자동차가 등장한 이래 자동 운전에 관한 연구가 계속되었습니다. 1980년대 들어 유명 자동차 기업의 벤츠, BMW아우디 등이 무인 자동차 프로젝트에 참여하는 연구는 더욱 박차를 가했다. 2000년대 들어서는 우리가 잘 아는 테았고 구글 등이 자동 운전 기술을 개발 중입니다.미국 자동차 기술 학회(SAE)은 자동 운전의 발달 수준을 6개 단계로 나눴는데 곧 완전 자동 운전이다 5단계에 도달할 것으로 예상됩니다. 우선 자동 운전 기술 발달 수준에 대해서 살펴봅시다. 자율성 수준 0이 수준은 수동 제어 차량에서 자율성이 전혀 없는 것을 나타냅니다. 물론 차량 시스템에 도로 주행시에 필요한 몇가지 보조 기능이 운전자가 차를 운전하는데 도움이 됩니다. 그러나 비상 제동 시스템 및 경로 제어처럼 차량을 “주행” 하지 않는 기능은 자율성을 인정하지 않으므로, 수준 0시스템으로 간주합니다. 오늘 도로를 달리는 대부분의 차량의 자율성은 수준 0입니다. 수준 1최저 수준의 자동 운전 단계인 수준 1은 드라이버를 지원하는 자동화 시스템을 갖추고 있습니다. 대표적인 예로 뒤의 차량과의 안전 간격을 유지하도록 지원하는 기능은 레벨 1의 자율성을 나타내고 있습니다. 이들 시스템은 다양하지만 일반적으로 LiDAR레이더 또는 카메라의 조합으로 자동적으로 가속 또는 브레이크를 작동시키고 차량이 전후방의 차량과 안전한 거리를 유지하도록 하겠습니다. 최근 발매되는 많은 신형 자동차 모델은 이 기능을 탑재하고 있어, 레벨 1의 자동 운전 차량입니다. 수준 2차원 2단계는 선진 운전 지원 시스템(ADAS, 어드밴스드 드라이버 평가 시스템)을 사용하고 있는지 알 수 있습니다. ADAS는 조종 장치(Steering)과 차량의 가속 또는 감속의 양쪽을 제어할 수 있습니다. ADAS는 조기 경보 및 자동화 시스템에 의한 운전자의 리스크 대처 능력을 향상시킵니다. ADAS는 고성능 센서 카메라 및 LiDAR을 활용하고 360도 3D이미지 및 실시간 데이터를 제공합니다. ADAS에는 안티 제동, 전방 충돌 경고, 차선 이탈 경고, 트랙션 컨트롤 등의 다른 기능도 있습니다. 현재 수준 2의 예로는 테슬라의 Autopilot(오토 파일럿)와 Cadillac(캐딜락)SuperCruise System(수퍼 크루징 시스템)이 있습니다.

테슬라 확장 오토파일럿
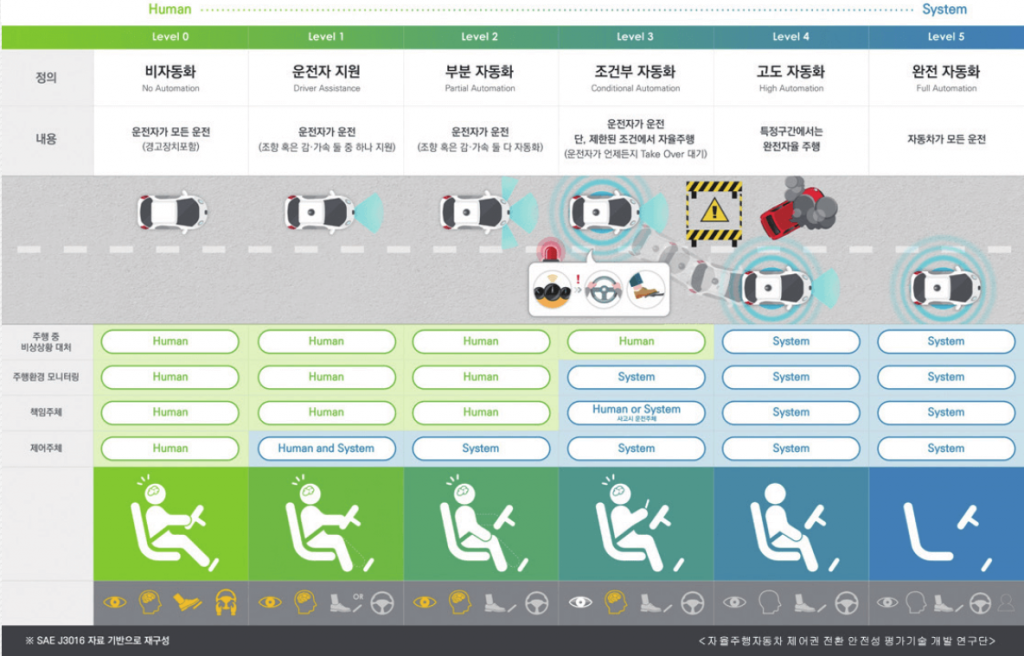
레벨 3주변 환경을 감지하며, 획득한 정보를 통해서 스스로 결정을 내릴 수 있는 차량이 레벨 3단 자동 운전 차량입니다. 이들 기능을 가진 차량이 있더라도 작업을 실행할 수 없는 경우에는 여전히 사람의 개입이 필요합니다. Audi(아우디)A8L는 레벨 3의 라이더, 센서 등을 결합한 Traffic Jam Pilot이라는 자율 기술을 선 보일 예정이었지만, 글로벌 규제 당국의 승인을 얻지 못해수준 3을 포기하지 않으면 안 된 적이 있습니다. 레벨 4레벨 3으로 레벨 4의 주된 차이는 문제가 발생하거나 시스템 장애가 발생하는 경우, 레벨 4차량은 스스로 개입하고 문제를 해결할 수 있다는 것입니다. 그래서 이들의 수준 4의 차량은 대부분의 상황에서 사람의 개입을 필요로 하지 않습니다. 그래도 운전자가 수동으로 차를 조종할 수 있는 옵션이 있습니다. 향후, 레벨 4의 차량은 택시나 공공 교통 기관의 용도로 활용될 전망입니다. 레벨 5레벨 5차는 완전 자동 운전이 가능하며 운전자가 개입할 필요는 없습니다. 이들의 차량에는 스티어링 휠 및 페달 등의 일반적인 차량의 컴포넌트는 없습니다. 레벨 5차량에 대한 복수의 시험이 있는데 아직 일반 대중이 이용할 수 있는 테스트는 없습니다. 최근 많은 자동차 업체가 2018년부터 2025년 사이에 레벨 5의 차량을 사용할 수 있다는 주장을 철회하고 수준 5의 자동 운전이 언제쯤 완성될지 불투명하게 되었습니다. 시판되는 차량의 자동 운전 기술은 수준 2수준으로 수준 3부터는 차량 주행의 주체가 차량이기 때문에 사고의 책임도 차량 및 업체가 됩니다. 그래서 많은 업체는 아직 레벨 3단계를 출시하기를 싫어합니다. 결국 자동 운전을 승인된 차량은 극소수이므로 아직 혁신의 여지가 있는 것처럼 보이고, 5단계의 자동화가 이뤄지기 전에는 10년이 걸릴 것으로 보입니다. 자동 운전 차의 센서 융합 센서 융합 센서 융합은 여러 센서의 Raw데이터를 바탕으로 추정된 데이터를 출력해야 하는 다양한 시스템에서 활용됩니다. 센서 융합은 여러 센서 입력을 결합하여 각각의 센서 입력보다는 정확한 통합된 1개의 결과를 생성하는 기능입니다. 센서 융합의 대표적인 예로 카르만 필터가 있습니다. 카르만 필터는 시간의 경과에 따른 일련의 관측된 측정치를 활용하고 자연스럽게 발생하는 통계적 노이즈나 기타의 부정확성을 필터링 하는 센서만 데이터보다 정확한 합산 추정치를 생성합니다. 자동 운전에서 센서 융합 ADAS(Advanced Driver Assistance System)현재 ADAS를 탑재한 많은 차량은 레이더, 광학 카메라, LiDAR또는 초음파 같은 다양한 센서의 정보를 활용하고 있습니다. 센서 융합은 이들 센서의 정보를 조합하고, 주변 환경을 더욱 명확히 파악하게 합니다. ADAS에 있어서 센서 융합의 대표적인 예는 전방 카메라와 레이더의 사이의 정보 융합입니다. 단독으로 사용할 경우 양쪽의 센서가 주변 환경을 완전히 검출할 수 없습니다. 카메라는 비, 안개, 햇빛 반사 등의 조건으로 문제가 있지만 색상 인식에 대해서는 신뢰할 수 있는 소스에 됩니다. 레이더는 물체 거리를 측정하는 데 유용하지만 도로 표지판 같은 특징적인 것을 인식하는 데에는 좋지 않습니다. 카메라와 레이더의 사이의 센서 융합에 대해서는 Adaptive Cruise Control(ACC)및 Autonomous Emergency Braking(AEB) 같은 신형 자동차 모델에서 볼 수 있는 ADAS의 예를 통해서 자세히 확인할 수 있습니다.
ADAS(어드밴스드 드라이버 어시스턴스 시스템)
자동 운전 차에 먼저 말한 것처럼 자동 운전 차 시스템에서 센서 융합의 최대 장점은 다양한 센서 융합 데이터가 개별 센서의 단점을 극복할 수 있다는 것입니다. 결과적으로, 이것은 각각의 결점을 보완하는 동시에 시스템의 전체적인 퍼포먼스가 신뢰성을 향상시킵니다. 자동 운전 자동차가 스스로 경로를 정할 때 센서 융합의 중요성이 가장 드러납니다. 이 경우 각각의 센서를 통해서 읽힌 값이 통합되어 차량 상태를 정밀 분석하고 주변 물체의 궤적을 예측합니다. 융합한 센서의 잡음 분산은 각각의 센서를 통해서 읽힌 값의 분산보다 작기 때문에 차량의 환경을 보다 정밀하게 인식할 수 있습니다.자율 주행차자율주행차에 대한 Inertial Labs의 솔루션관성실험실_INS-D관성실험실_INS-DRobotics Plus Robotics Plus는 정밀 농업 분야에 적절한 무인 지상 차량(UGV)라인을 개발했습니다. 광학 보조 데이터와 융합한 관성 항법 시스템(INS)은 실시간 지리 좌표 데이터를 생성할 수 있습니다. 첨단 알고리즘에 이 데이터가 입력되면 UGV가 주변 환경을 인식할 수 있습니다. 과수원과 원예 작업을 기계화하려는 수요가 이러한 UGV는 다양한 환경에서 다양한 용도에 적용되도록 지속적으로 개발되고 있습니다. Robotics Plus는 노동력 부족, 작물 지속 가능성, 수분 부족 및 수확량 확보라는 더욱 중요하게 되는 농업 과제를 해결하기 위해서 만들어졌습니다. Inertical Labs는 Robotics Plus와 협력하고 재배 능력을 향상시키고 수확량의 확보를 계속적으로 개선한다는 목표를 달성하기 위해서 함께 노력하고 있습니다. Pliant Offshore Pliant Offshore는 3D소프트웨어 기술과 융합한 해상 측정 및 제어 분야의 전문 메이커입니다. Inertial Labs는 Pliant Offshore와 협력하고 가혹한 환경에 견딜 수, 정밀한 결과를 얻은 정밀 제품을 개발했습니다. Inertial Labs의 관성 기술은 Pliant Offshore의 무인 선박(USV, Unmanned Surface Vehicle)로 추적 및 모니터링용으로 이용된다. USV는 Multi-Beam Echo Sounder(MBES)과 융합한 Inertial Labs의 MRU(Motion Reference Unit)센서를 사용하고 정확한 지리 좌표 데이터에서 감시 및 모니터링을 실시할 수 있습니다. Initial Labs는 Plant Offshore와 지속적으로 협력하여 사용자의 시간 효율성, 비용 효율성, 안전성을 극대화하기 위해서 제품을 개발·개선하고 있습니다.