EV3으로 라이트레이싱하다_자율주행자동차_컬러센서_레고마인드스톰
EV3을 이용해서 라이트 레이싱 하는 방법을 알아봅시다. 라이트 레이싱은 자동 운전 자동차의 기본 원리로서 자동차에 프로그래밍을 하여 사람이 수동으로 운전하지 않아도 스스로 주행하도록 하는 것입니다. 그래서 우리는 그런 자동화된 프로그램을 만드는 것을 목표로 하고 있습니다.
학습 순서 1. 라이트 레이싱을 조사하다 2. 라이트 레이싱 프로그래밍 13. 라이트 레이싱 프로그래밍 2.
라인레이싱을 조사하는 라인트레이싱이란 라인(LINE)과 트레이싱(TRACING)의 합성어로 선을 따라 이동하는 것을 말합니다. 우리가 드라이빙 베이스를 직접 조종하지 않고도 스스로 이동할 수 있도록 하는 것이 목적입니다.

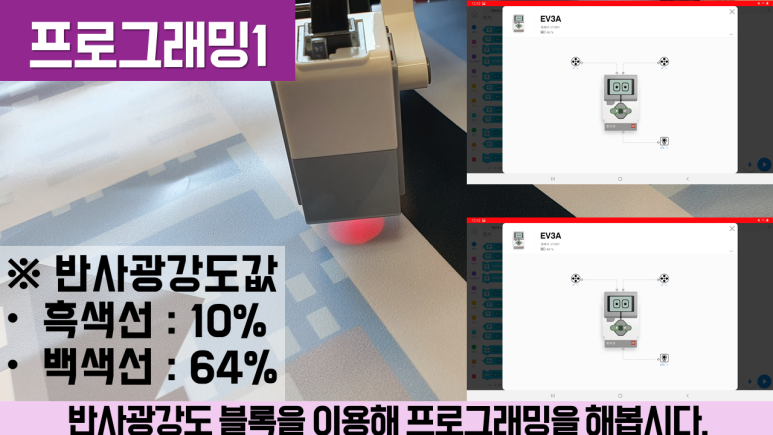
라인 레이싱의 작동 원리 라인 트레이싱은 검은 선이 나오지 않도록 하는 것이 중요합니다. 검은 선을 벗어나려면 반대 방향으로 주행시켜서 빠지지 않도록 해야 합니다. 또한 여기에서는 컬러 센서를 이용하여 프로그래밍을 하는데, 검은 선과 흰 선으로 반사되는 적외선의 차이를 이용하여 프로그래밍을 합니다.


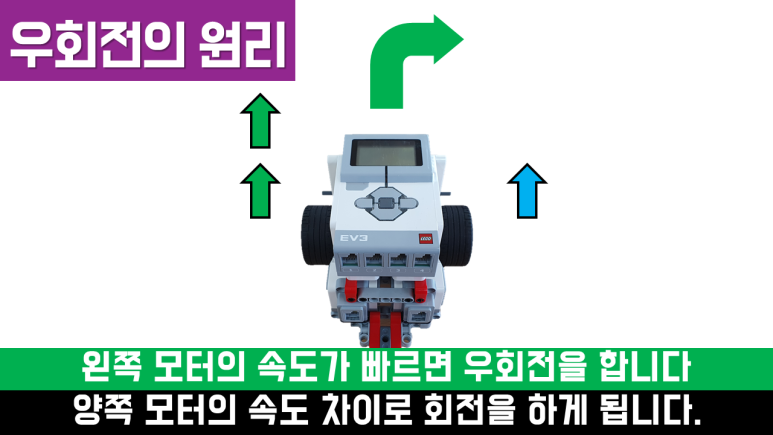
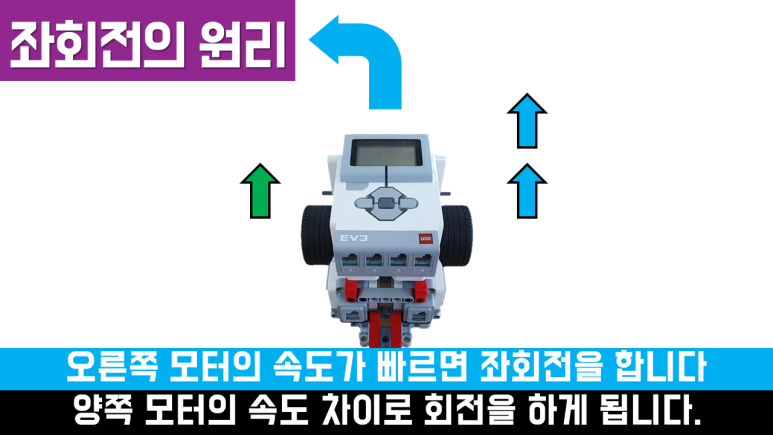
회전원리 실제 자동차가 회전할 때에는 조향장치를 이용하여 바퀴의 방향을 바꿉니다. 하지만 EV3를 포함한 대부분의 프로그래밍 도구에는 조향 장치가 없습니다. 따라서 바퀴의 방향을 바꾸지 않고 바퀴의 속도차를 사용하여 회전을 합니다. 즉, 같은 시간에 다른 거리를 가야 하기 때문에 드라이빙 베이스가 한쪽으로 치우쳐 이동하게 됩니다. 속도가 느린 방향으로 회전을 합니다. 또한 양륜의 회전 방향이 다르면 속도의 차이가 더 커지고 회전을 더 급격하게 하게 됩니다.



컬러센서 장착 라인트레이싱을 하려면 컬러센서를 조립하여 드라이빙 베이스에 장착해야 합니다. 조립도를 보고 조립을 먼저 합니다.

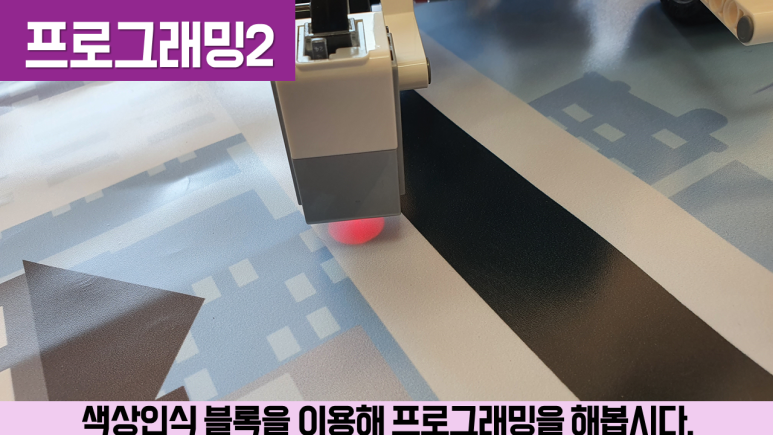
컬러센서의 원리 카레센서는 적외선을 송신하고 반사하는 적외선의 값을 수신하게 됩니다. 모든 물체와 색은 반사되는 적외선의 값이 다르기 때문에 그 차이를 이용하여 색을 구별할 수 있습니다. 그리고 그 센서 값은 EV3CLASSROOM 프로그램의 화면 상단에 있는 값을 이용하여 확인하고 프로그래밍에 이용합니다.

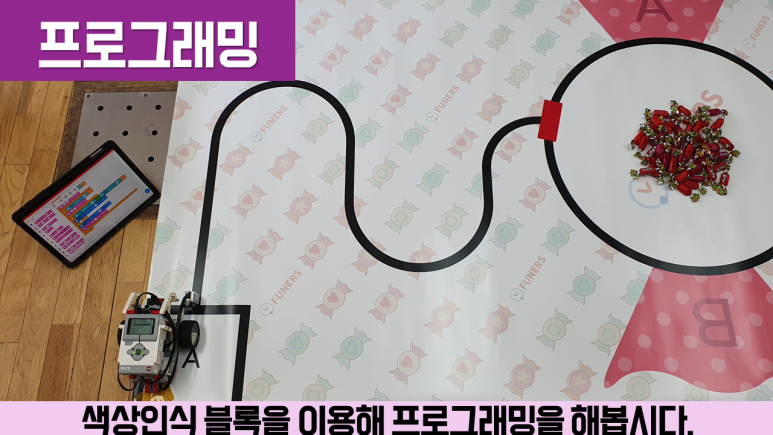
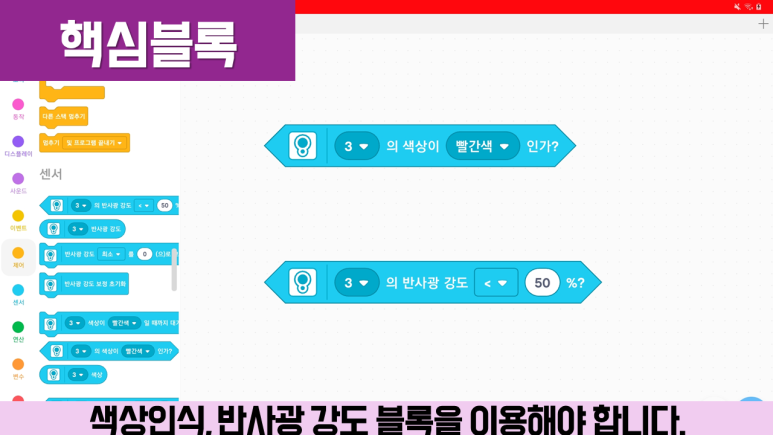
라인트레이싱 프로그래밍 라인트레이싱을 할 때는 반사광 강도블록을 이용하는 방법과 컬러블록을 이용하는 방법이 있습니다. 각각 장점과 단점이 있어 이것저것 해보고 상황에 최적화된 방법으로 프로그래밍을 하는 것이 중요합니다.





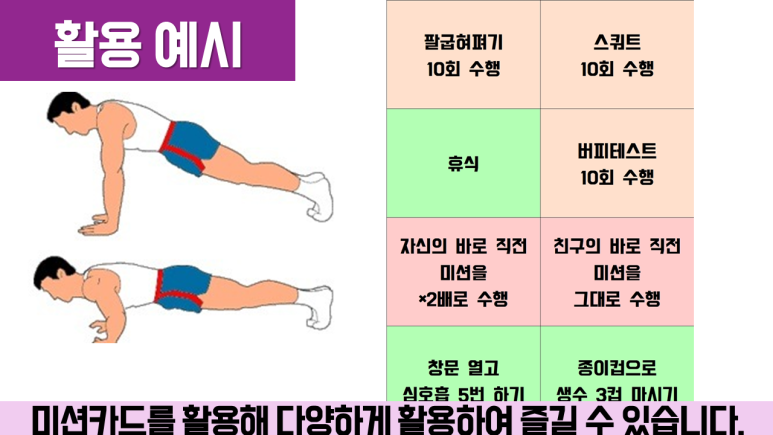
활용 예라인 트레이싱을 이용하면 여러 가지 방법으로 게임이나 놀이를 할 수 있습니다 잡을때까지 프로그래밍을 하면 라이트레이싱으로 그 목표에 도달한후 사탕이나 미션지를 당겨 게임을 할 수 있습니다. 운동이 부족한 현대인에게 운동할 수 있는 기회도 제공할 수 있습니다. 옆에 있는 친구의 건강을 돌볼 수도 있습니다.


정리하는 드라이빙 베이스는 활용할 수 있는 요소가 너무 많기 때문에 분해하지 말고 컬러센서만 분해해서 정리하는 게 좋을 것 같아요